Mechanik und Kinematik:
Eine
einfache Kinematik verringert den Rechenaufwand, den der
Microcontroller bei einer Bewegung der Gondel bewerkstelligen muss,
benötigt jedoch im vorliegenden Fall eine komplexere Mechanik. Durch
den geringeren Rechenaufwand kann der Microcontroller die
Schrittmotoren mit einer höheren Frequenz ansprechen, was eine
schnellere Bewegung der Gondel erlaubt. Die zu berechnenden Schritte
der Motoren vervielfachen sich, wenn die Motoren nicht im
Vollschritt-Betrieb angesprochen werden, sondern jeder Vollschritt
in mehrer Mikroschritte unterteilt wird. Da im Mikroschrittbetrieb
Laufgeräusche und Schwingungen erheblich verringert werden, sorgt
diese Ansteuerungsvariante auch für ein besseres Druckbild und einen
anwenderfreundlicheren Betrieb.
Welche Variante sich für den
praktischen Einsatz besser eignet, soll im Laufe der Arbeit getestet
werden.
1. Aufhängung der Gondel:
Die Aufhängung der Gondel beeinflusst maßgeblich
die Kinematik des Systems.
Viele Seilroboter haben feste
Aufhängungspunkte, an welchen die Seile befestigt werden.
1.1. Pantograph-Prinzip
Vorteil:
alle
Seile zeigen am gondelseitigen Aufhängungspunkt immer in die Mitte
der Gondel (Fluchtung mit Werkzeug)
dadurch: wesentlich einfachere
Berechnung der Stiftposition.
Nachteil:
mechanisch komplex
viele bewegliche Teile
Verkippung der Gondel nur bis zu einem
gewissen Winkel zulässig
Gondelt muss an Unterseite beschwert
werden, um zu stake Verkippung zu vermeiden
LINK zum Thread im MaslowCNC-Forum, in welchem das Prinzip
entwickelt wurde
VIDEO zur
Veranschaulichung des Prinzips
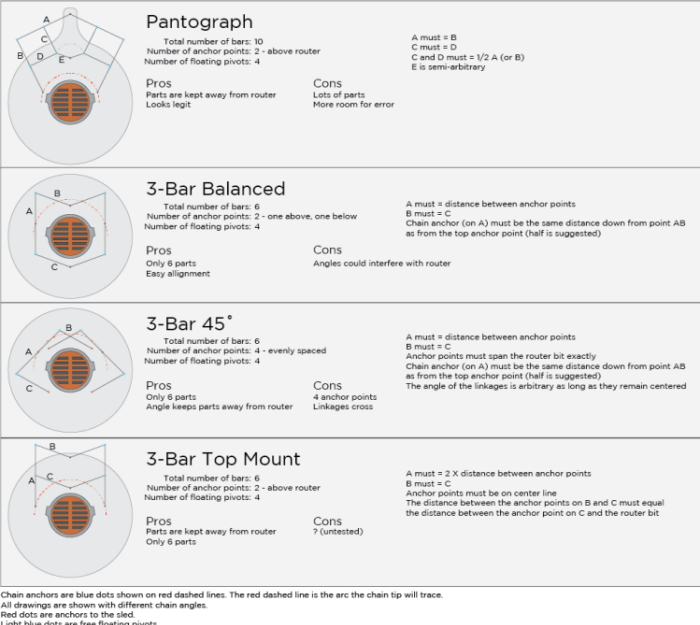
Veranschaulichung der Realisierungsmöglichkeiten eines
Pantograph-Prinzips (Quelle)
1.2. Ringlager-Prinzip
Vorteil:
alle
Seile zeigen am gondelseitigen Aufhängungspunkt immer in die Mitte
der Gondel (Fluchtung mit Werkzeug)
dadurch: wesentlich
einfachere Berechnung der Stiftposition
Gondel kann frei
rotieren, keine maximale Verkippung
Nachteil:
mechanisch komplex
vier übereinandergeschichtete Ringlager notwendig, dadurch liegen
die Riemen auf unterschiedlicher Höhe
Lager müssen sehr frei
laufen, da nur kleine Kräfte um die Hochachse wirken -> Gefahr von
ruckeln
1.3. feste Aufhängung
Vorteil:
einfacher Aufbau
wenige Komponenten
kostengünstig
Nachteil:
komplexe Kinematik -> hoher Rechenaufwand
2. Was tun mit dem losen Riemenende?
2.1 mit Gewicht beschweren
Vorteil:
Riemenende hebt und senkt sich bei Bewegung der Gondel
relativ kontrolliert
Nachteil:
Gewicht kann an Kanten
hängen bleiben
Riemen kann sich verdrillen
2.2 mit
Gewicht beschweren, Gewicht in Rohr führen:
Vorteil:
Gewicht kann nicht an Kanten etc. hängen bleiben
Verhinderung der
Verdrillung bspw. durch Vierkantrohr möglich
Nachteil:
hoher Platzbedarf
2.3 Riemen in Kettensack auffangen
Vorteil:
geringer Platzbedarf
Nachteil:
Riemen kann sich verdrillen und verheddern
2.4 Riemen aufwickeln (Prinzip Skizipper)
Vorteil:
geringer Platzbedarf
keine Verdrillung
Riemen
verheddert sich nicht
geringere Belastung des
Motors
Nachteil:
höhere
Komplexität
2.5 Riemen
spannen (Prinzip Maslow)
Skizipper als Riemenspanner
Vorteil:
keine Verdrillung
kein Verheddern
kleines
Packmaß
Nachteil:
relativ hoher Platzbedarf wenn aufgebaut
größere Belastung des Motors
überschneidung der gespannten Riemen -> verhaken möglich
3 Ausrichtung der Motoren
zueinander:
3.1 händisch
Vorteil:
einfach
kostengünstig
Nachteil:
ungenau
3.2 mit Laser/Zielpunkt an den Motoren
Vorteil:
einfach
relativ kostengünstig
genau
Nachteil:
erhöhte Komplexität
höhere Kosten als händische Ausrichtung
|
{kind=link}