
Seilroboter, im horizontalen Betrieb
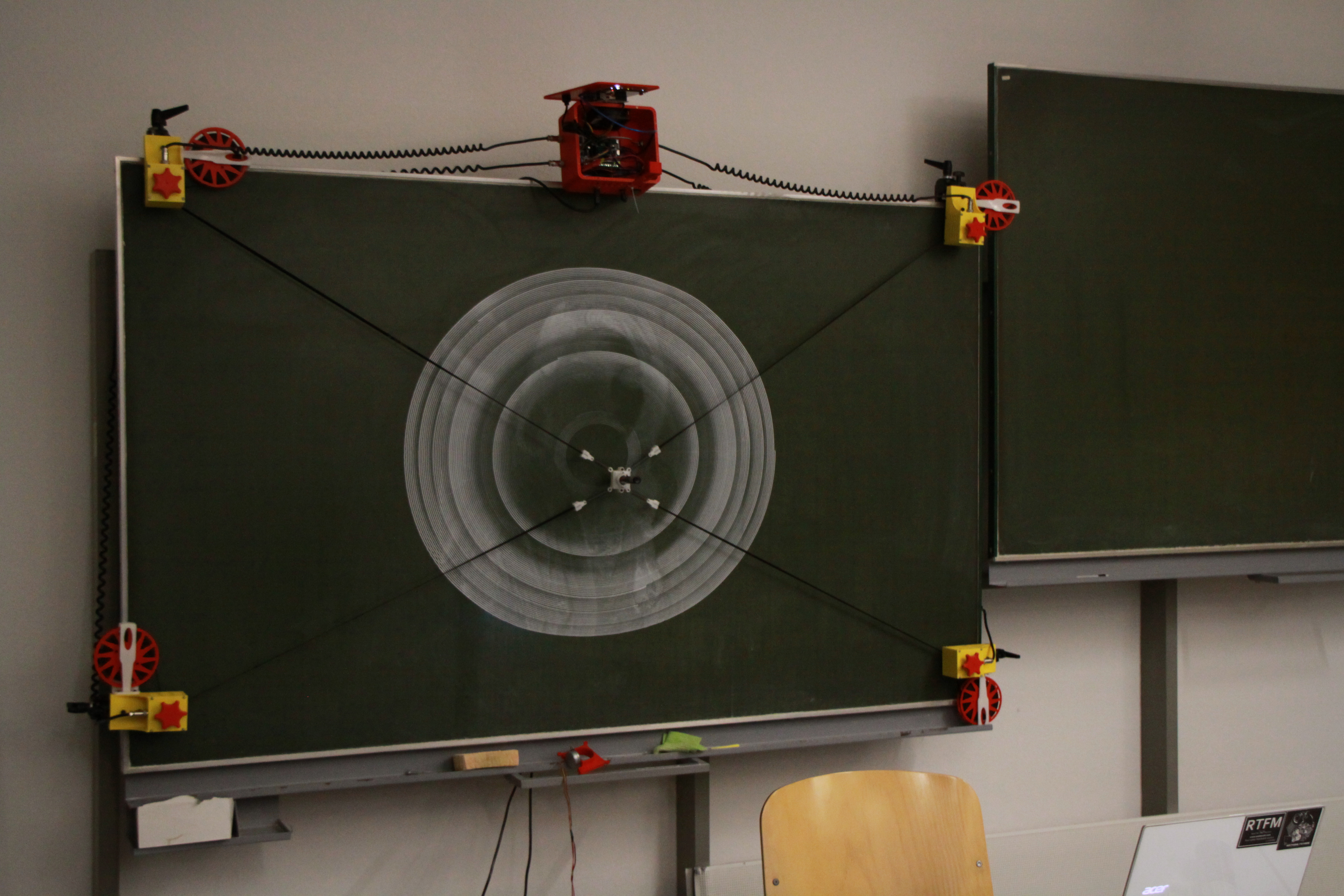
Seilroboter, im vertikalen Betrieb
1. Motoreinheit:
Die Motoreinheit besteht aus folgenden Komponenten:
Motor: fördert den Riemen
mittels einer Riemenscheibe und eines Kugellagers.
Handknauf: zur manuellen Bedienung des Motors, mit
Markierung der Wellenposition zur Vermessung der Maschine
Riemenspanner: wickelt den nicht benötigten Teil
des Riemens auf, enthält eine Rollfeder (Ski-Zipper-Prinzip)
Steckbuchse für Motorkabel
Manfrotto-Klemme: dient der Befestigung des Motors an
verschiedenen Oberflächen
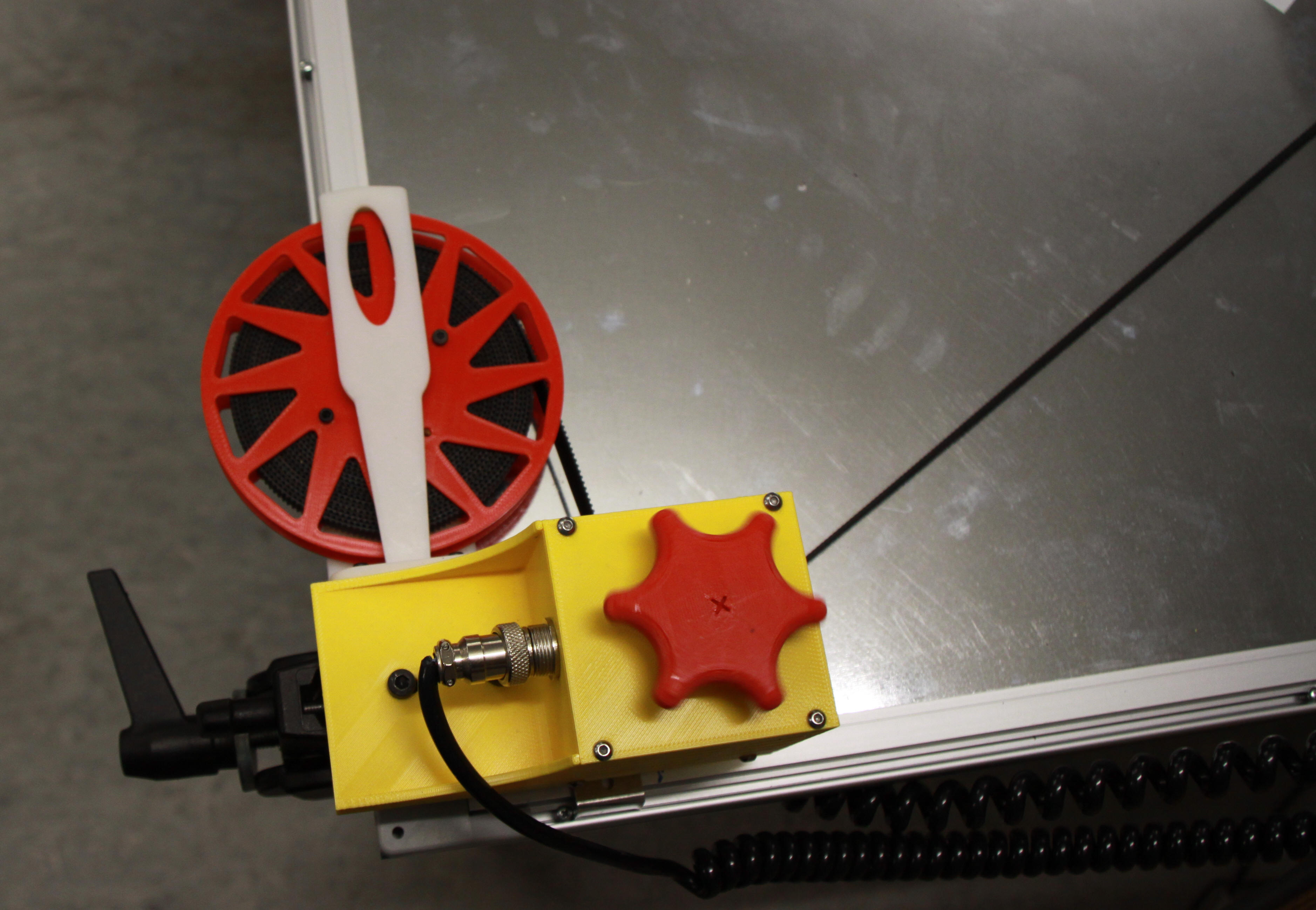
Motoreinheit, an ein Whiteboard geklemmt

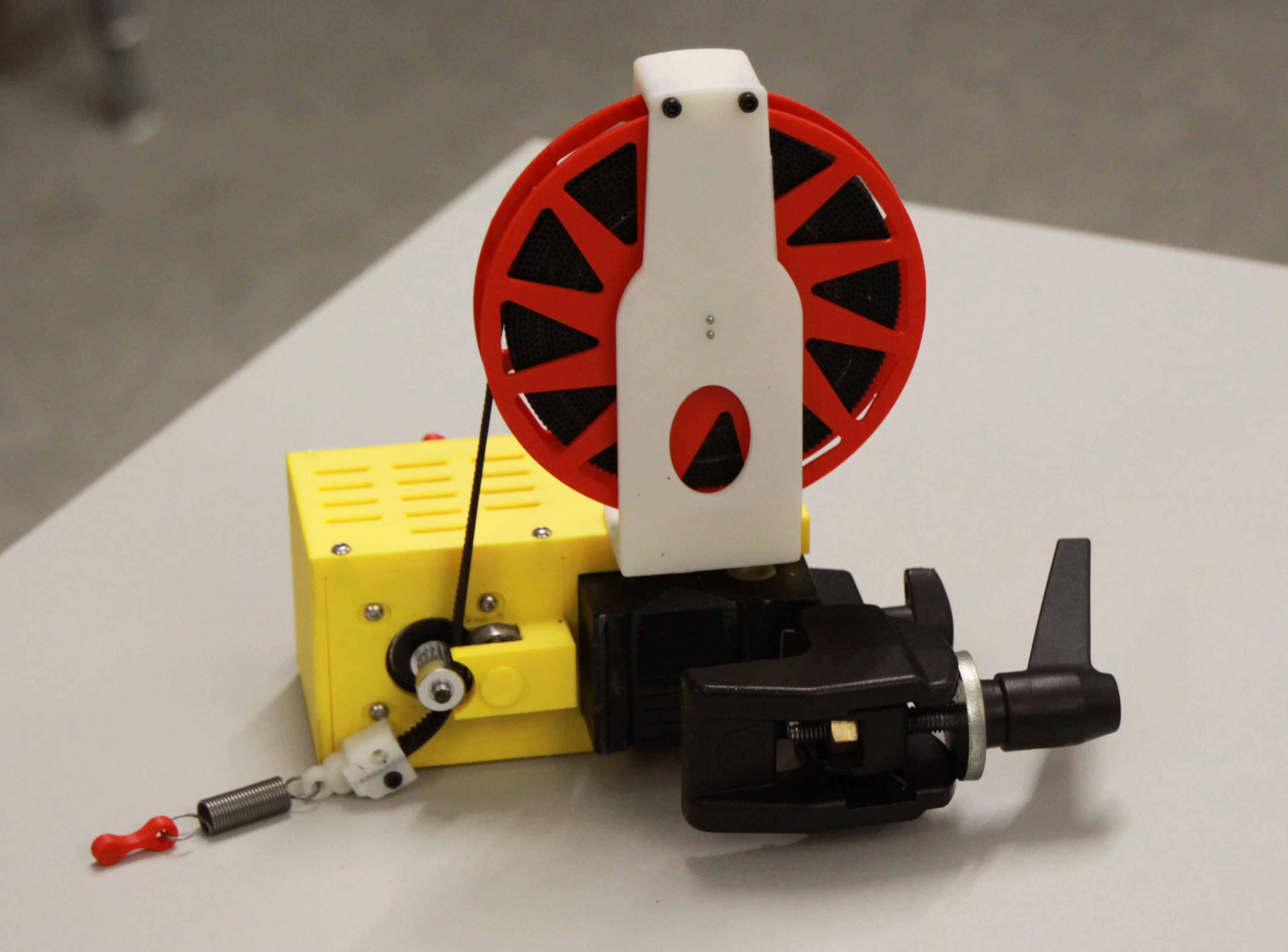
Motoreinheit, Seitenansicht
Motoreinheit, Ansicht von unten

Motoreinheit,
Detail im Bild: Riemenförderung und gefederter, magnetischer Verbinder zur
Aufhängung der Gondel

Motoreinheit,
Detail im Bild: Riemenspanner mit Verstärkung der Federaufhängung durch
eingeklebte Pass-Stifte
2. Steuereinheit:
Die Steuereinheit
besteht aus folgenden Komponenten:
Gehäuse: zur Befestigung
dient eine Manfrotto-Klemme, drehbar in 90°-Schritten,
Lüfter und EIN/AUS-Schalter
Arduino Due: dient
der Maschinensteuerung, ausgestattet mit RADDS-Shield und
Schrittmotortreibern
Raspberry Pi mit 5"-Touchscreen: Repetier Server
zur Speicherung von G-Codes und für Stand-alone-Bedienung und -Betrieb
der Maschine
Anschlüsse, Verbindung zur Maschine:
USB-Anschluss Typ B (neben EIN/AUS-Schalter): flashen
des Arduinos per Kabel
USB-Anschluss Typ A:
(neben Touchscreen):Hochladen von G-Codes mittels USB-Stick
Barrel-Type Anschluss, 24V DC: Spannungsversorgung
der Maschine mittels Akku oder Netzteil (Toleranz: 12V-30V)
Anschluss für Motorkabel: Verbindung der Motoren
mit der Steuerung. Anordung der Buchsen entspricht Anordnung der
Motoren
WLAN-Verbindung: Maschinensteuerung,
Hochladen von G-Codes und OTA-flashen des Arduinos mittels
Browser-Interface

Steuereinheit,
Vorderansicht: Touchscreen mit Anzeige der verbleibenden Druckzeit,
USB-Buchse Typ A, Motorkabel

Steuereinheit, Ansicht von unten: USB-Buchse Typ B, Barrel-Anschluss für
Versorgungsspannung, EIN/AUS-Schalter

Steuereinheit,
Draufsicht: Lüfter und Manfrotto-Klemme

Steuereinheit,
Rückansicht: Manfrotto-Klemme kann für unterschiedliche
Befestigungspositionen in 90°-Winkeln gedreht verschraubt werden
3. Gondel:
Es wurden mehrere Gondeln für die Maschine entwickelt,
die jeweils für bestimmte Einsatzmöglichkeiten optimiert wurden.
Aktuell sind bereits sieben verschiedene Gondeltypen entworfen,
konstruiert, gebaut und getestet.
Die Gondeln werden wie
folgt klassifiziert:
Aufhängung der Gondel:
-1: Die Gondel wird direkt am Riemen befestigt,
-2:
Die Gondel wird
in Federn am Riemenende eingehängt,
-3: Die
Gondel wird
mittels Magnetverbinder gefedert oder ungefedert mit den Riemen
gekoppelt.
Die Gondeln tragen jeweils einen Stift, welcher
je nach Aufbau der Gondel
-A: direkt in die
Gondel eingesetzt wird, oder
-B: mittels
Schnellwechselsystem mit der Gondel verschraubt wird.
Zudem
kann eine Gondel eine Mechanik zur Bewegung des Stiftes in der
Z-Achse enthalten. Folgende Konfigurationen sind dabei möglich:
-a:
keine Z-Achse
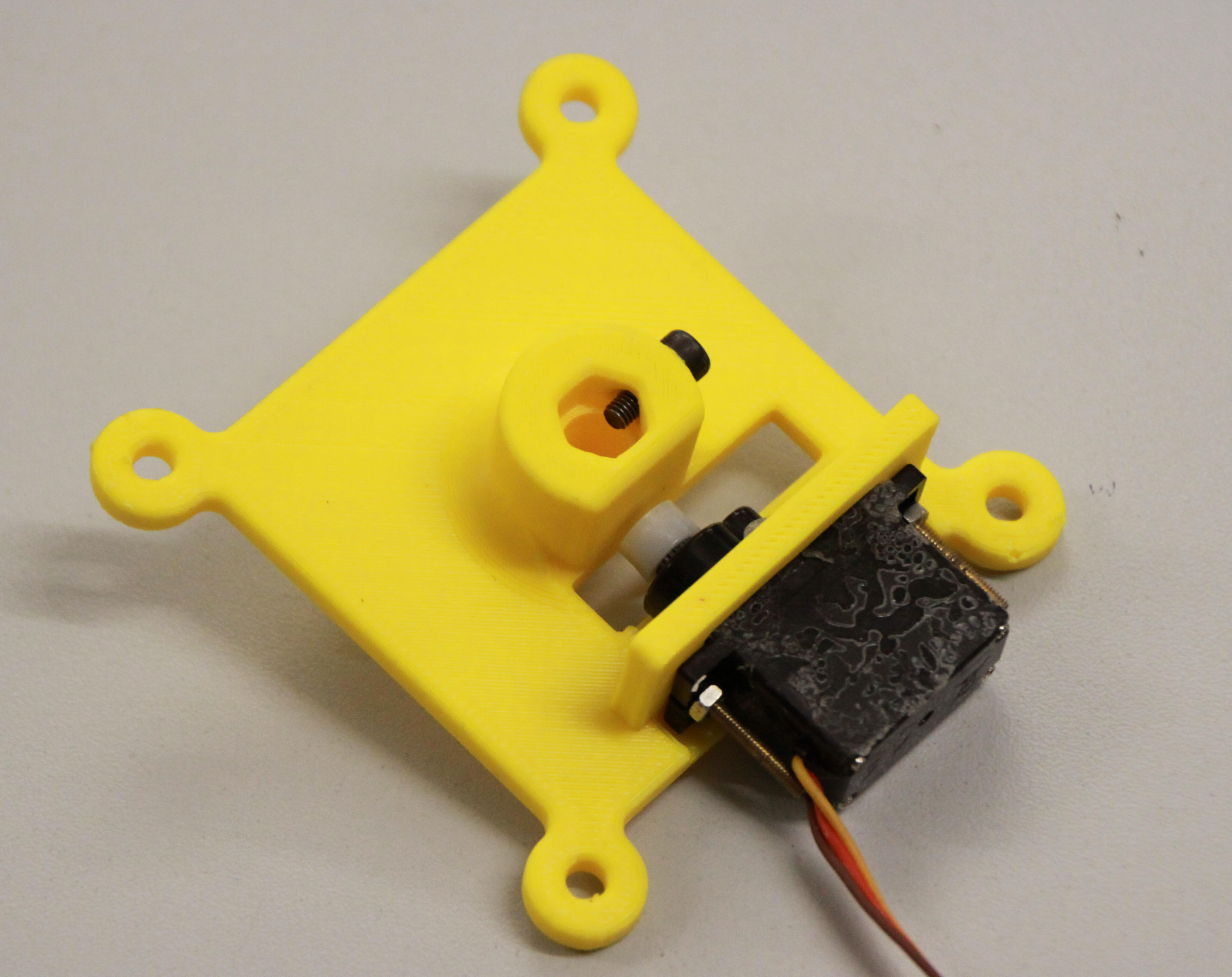
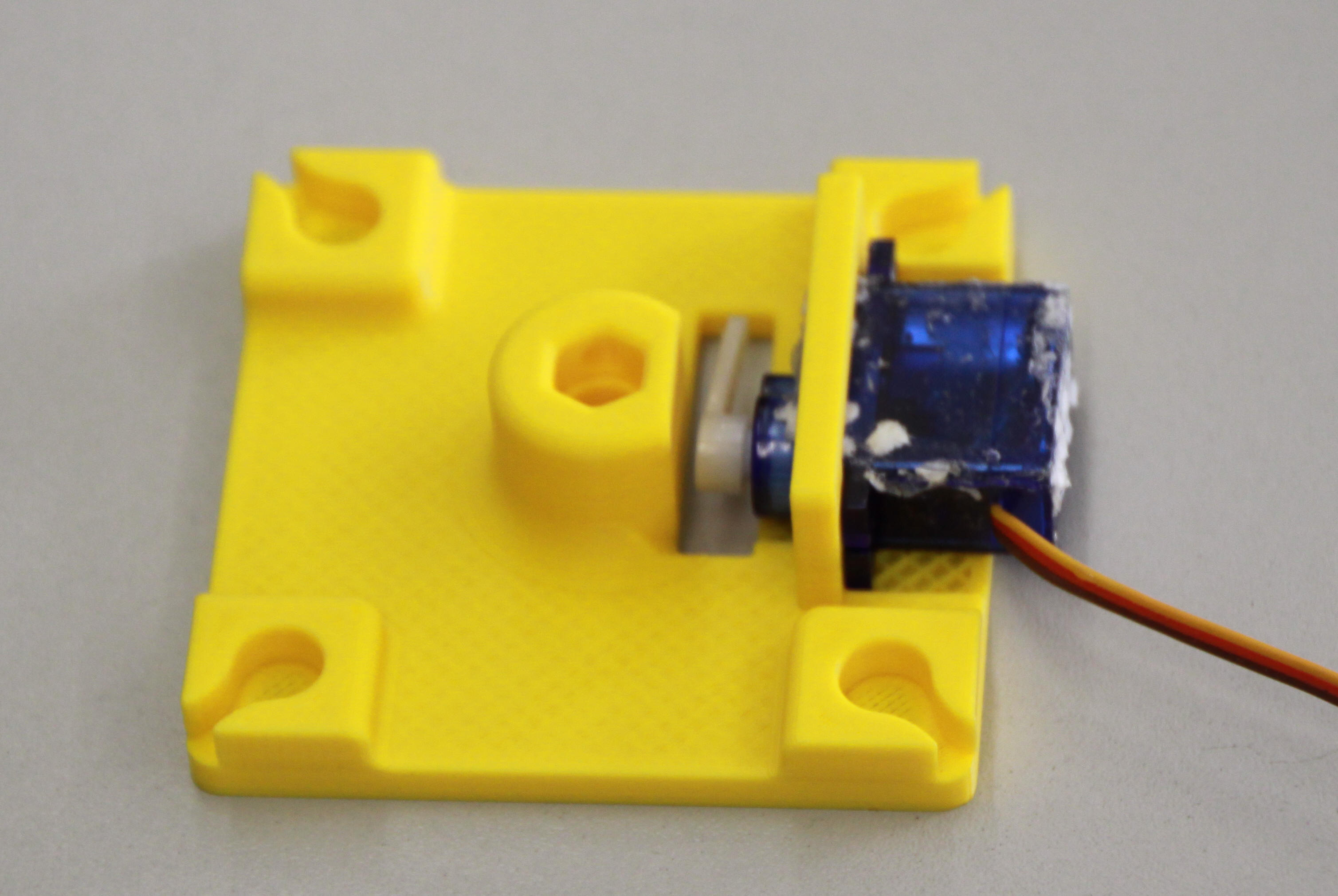
-b: Z-Achse mit Servo als Aktuator
(Ansteuerung mittels M-Code
M340 P0 S<Position in uS (PWM)>, Synchronisierung mittels
M400 vor M340-Befehl)
-c: Z-Achse mit
Schrittmotor als Aktuator (Ansteuerung Mittels G-Code
G1 Z<Position in mm> F<Geschwindigkeit>)
Die Gondeln
können somit klassifiziert werden, Typ 3Aa steht beispielsweise für
eine Gondel mit Magnetverbinder und fester Stifthalterung ohne
Z-Achse.

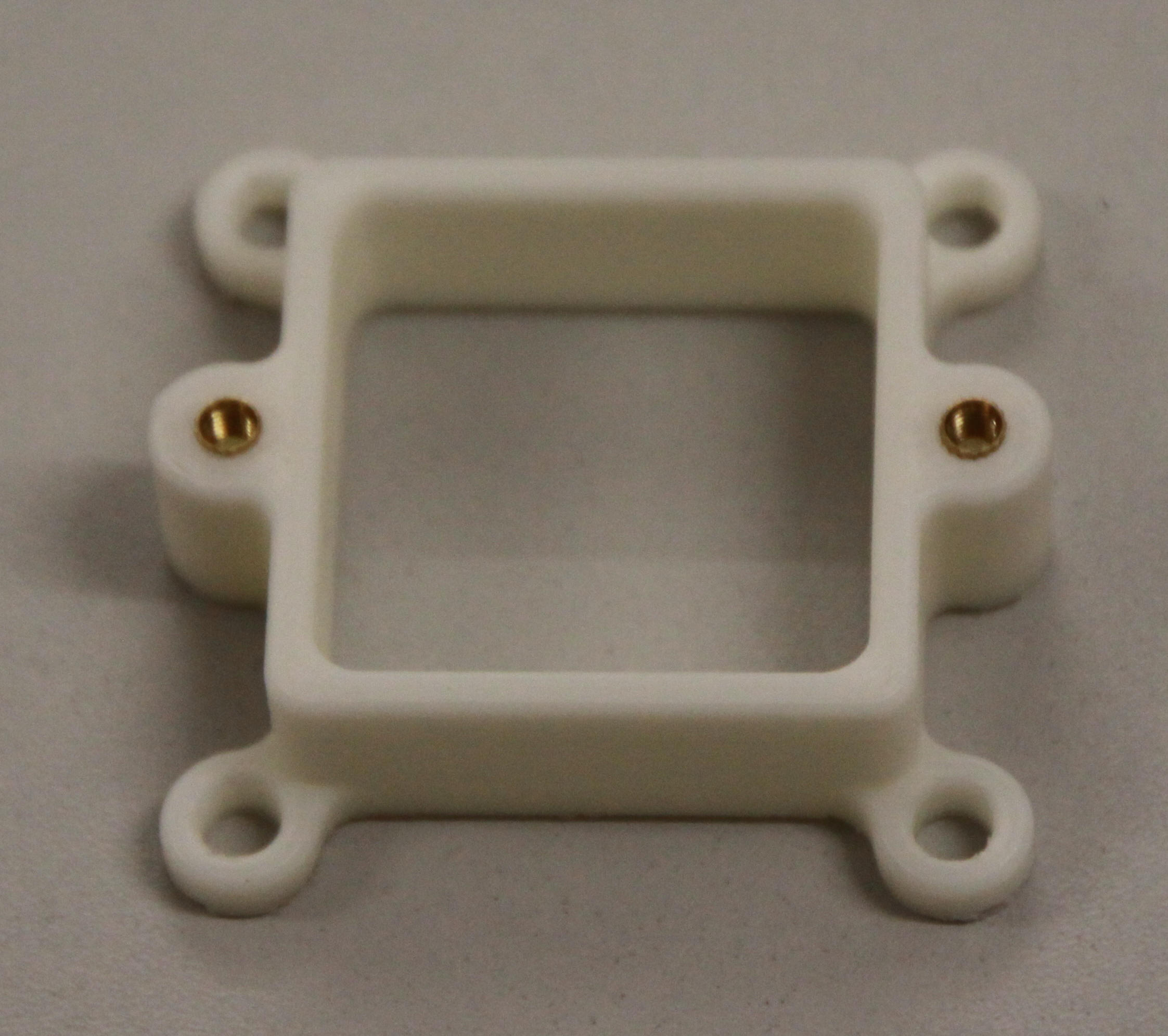
Halterungen des Schnellwechselsystems (für
Gondeln des Typs xBx, mit verschiedenen Stiften bestückt)

magnetische Riemenhalter zur gefederten (oben) bzw. direkten
Schnellmontage (für Gondeln des Typs 3Xx)
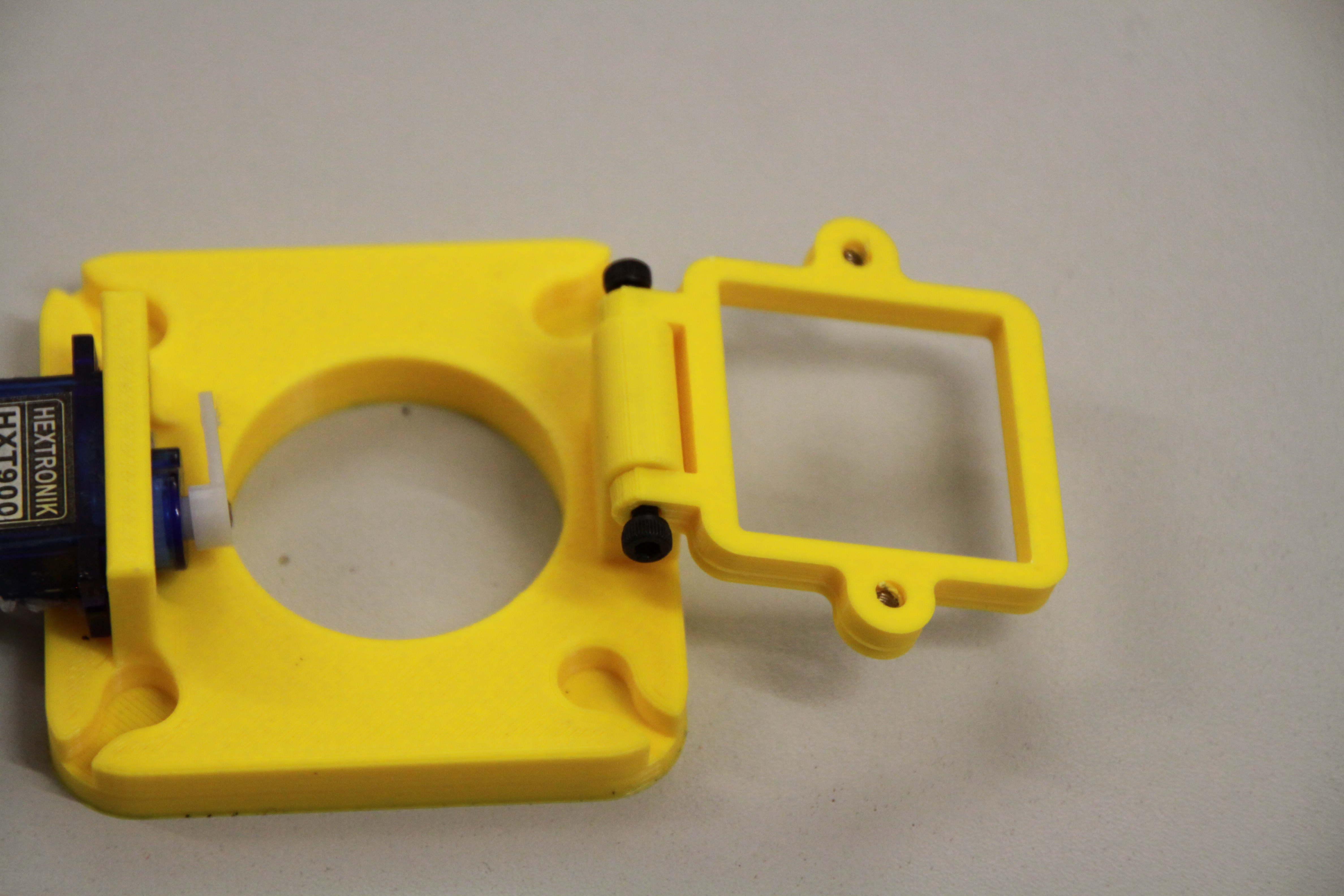
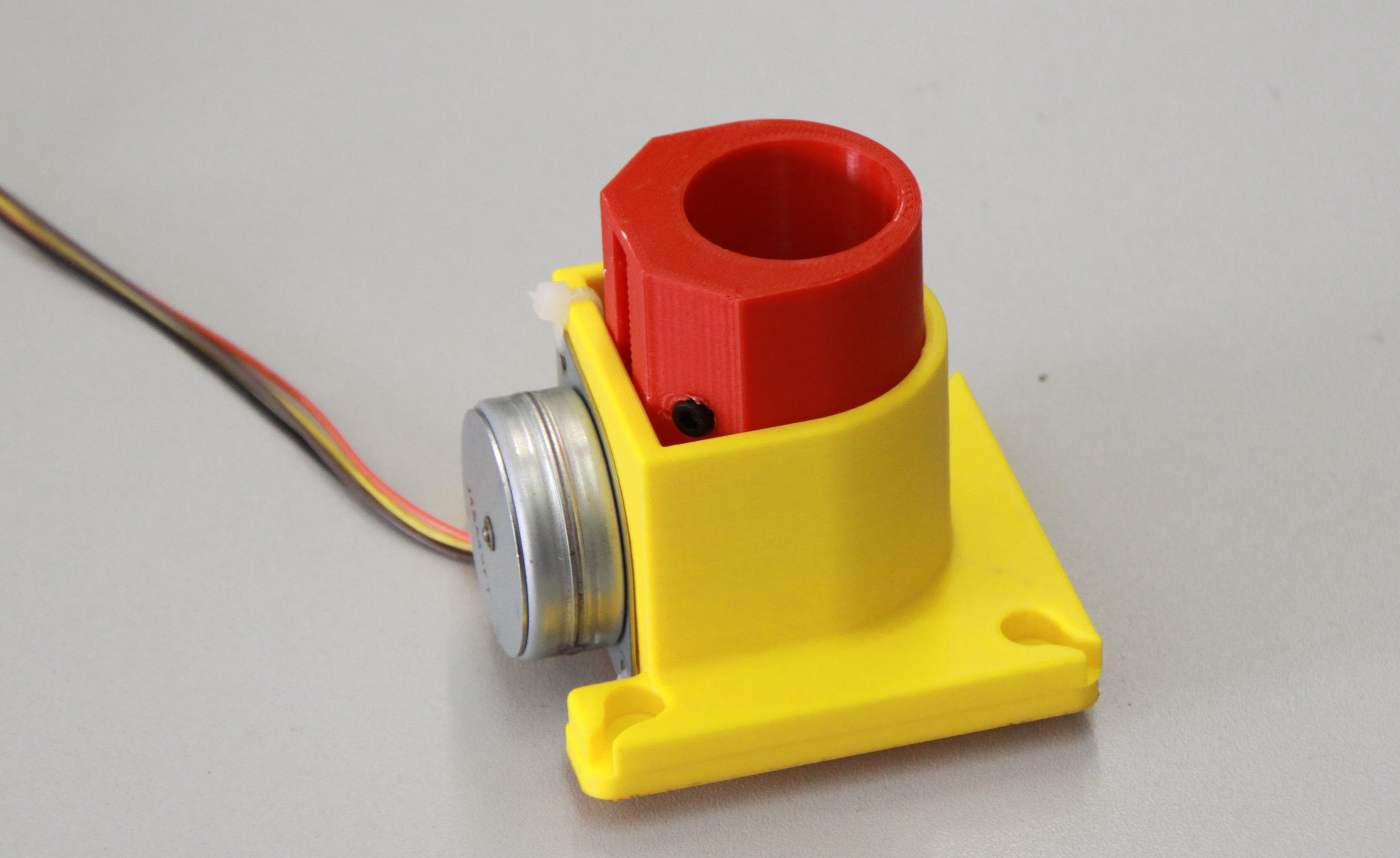
Gondel Typ 2Ba
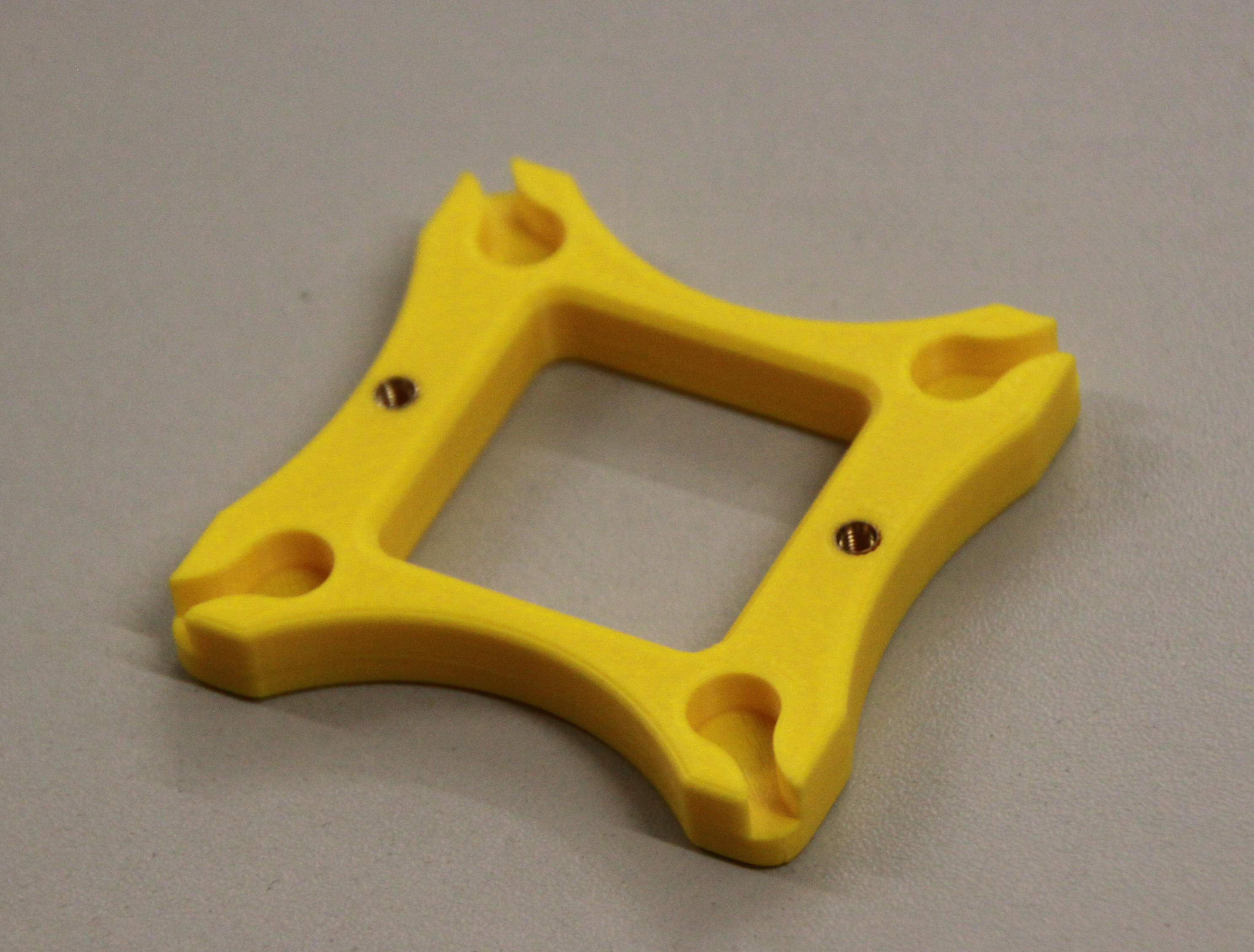
Gondel Typ 3Ba
Gondel Typ 2Ab (Bild #1)

Gondel Typ 2Ab (Bild #2)
Gondel Typ 3Ab
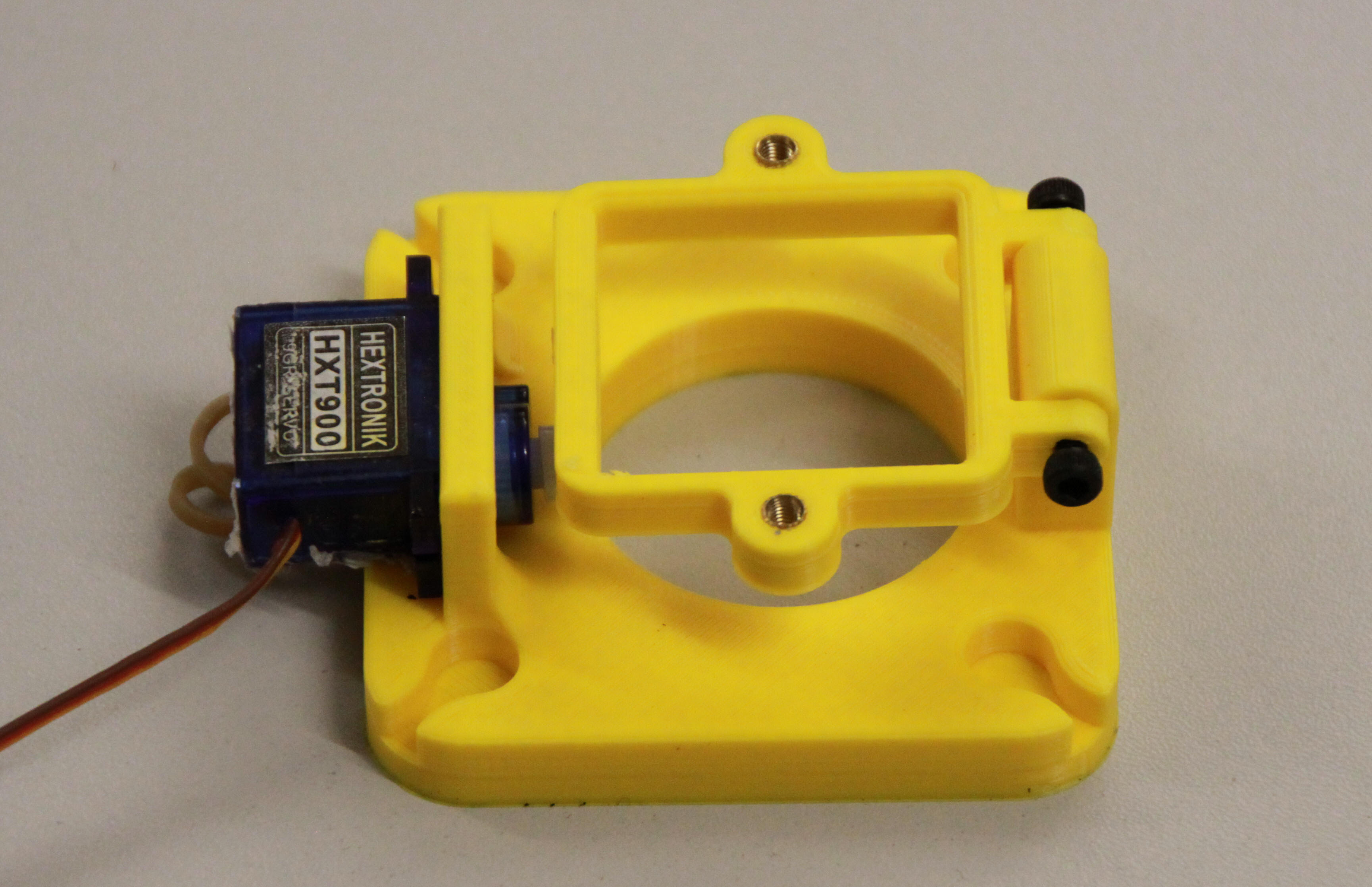
Gondel Typ 3Bb (Bild #1)
Gondel Typ 3Bb (Bild #2)
Gondel Typ 3Ac (Bild #1)

Gondel Typ 3Ac: Funktionsprinzip Zahnstange/Zahnrad (Bild #2)

Gondel Typ 3Ac: Detail gedruckte Zahnstange mit Pitch 1/20 Zoll
(Bild #3)
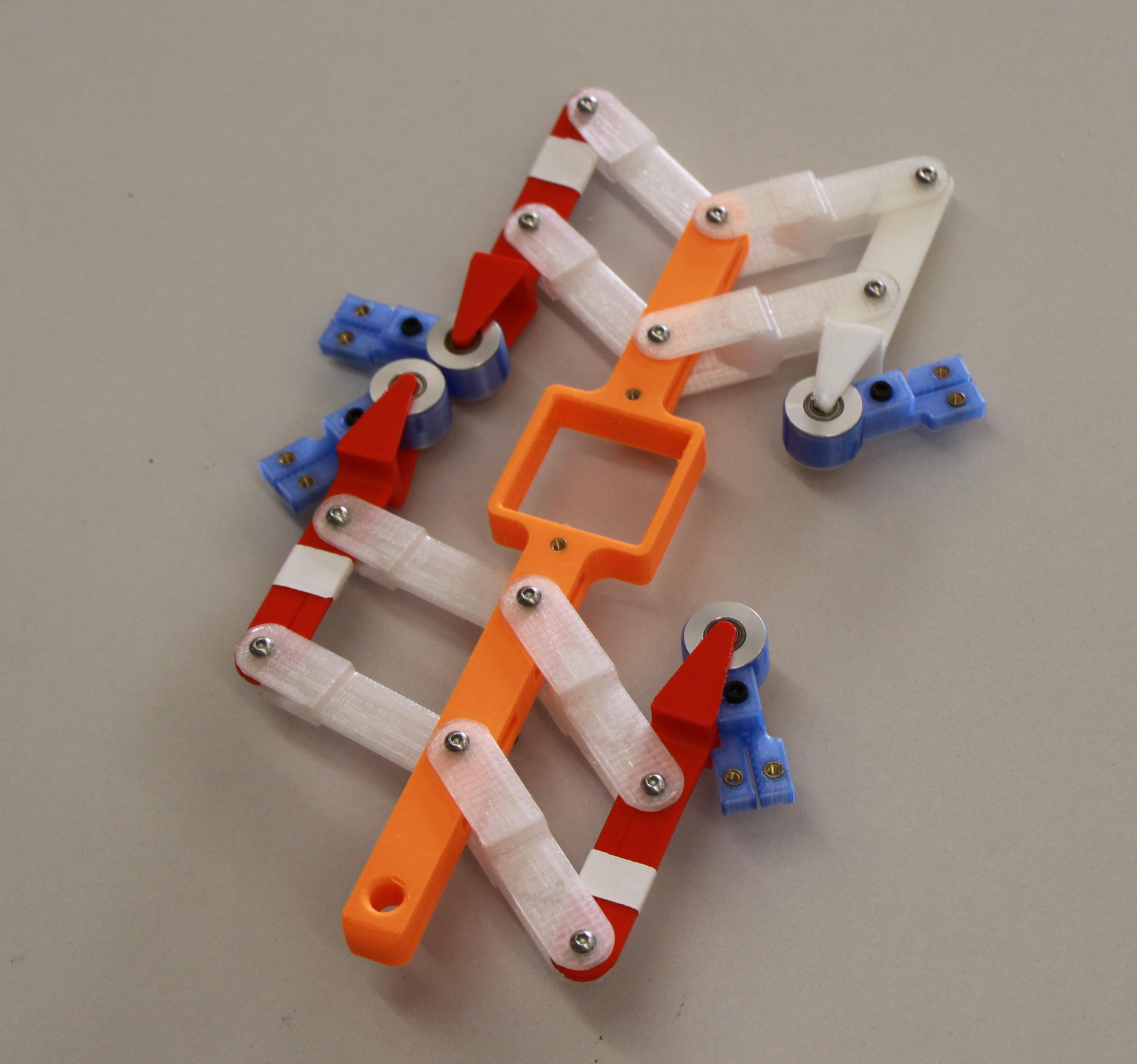
Gondel Typ 1Ba mit Pantograph-Kinematik
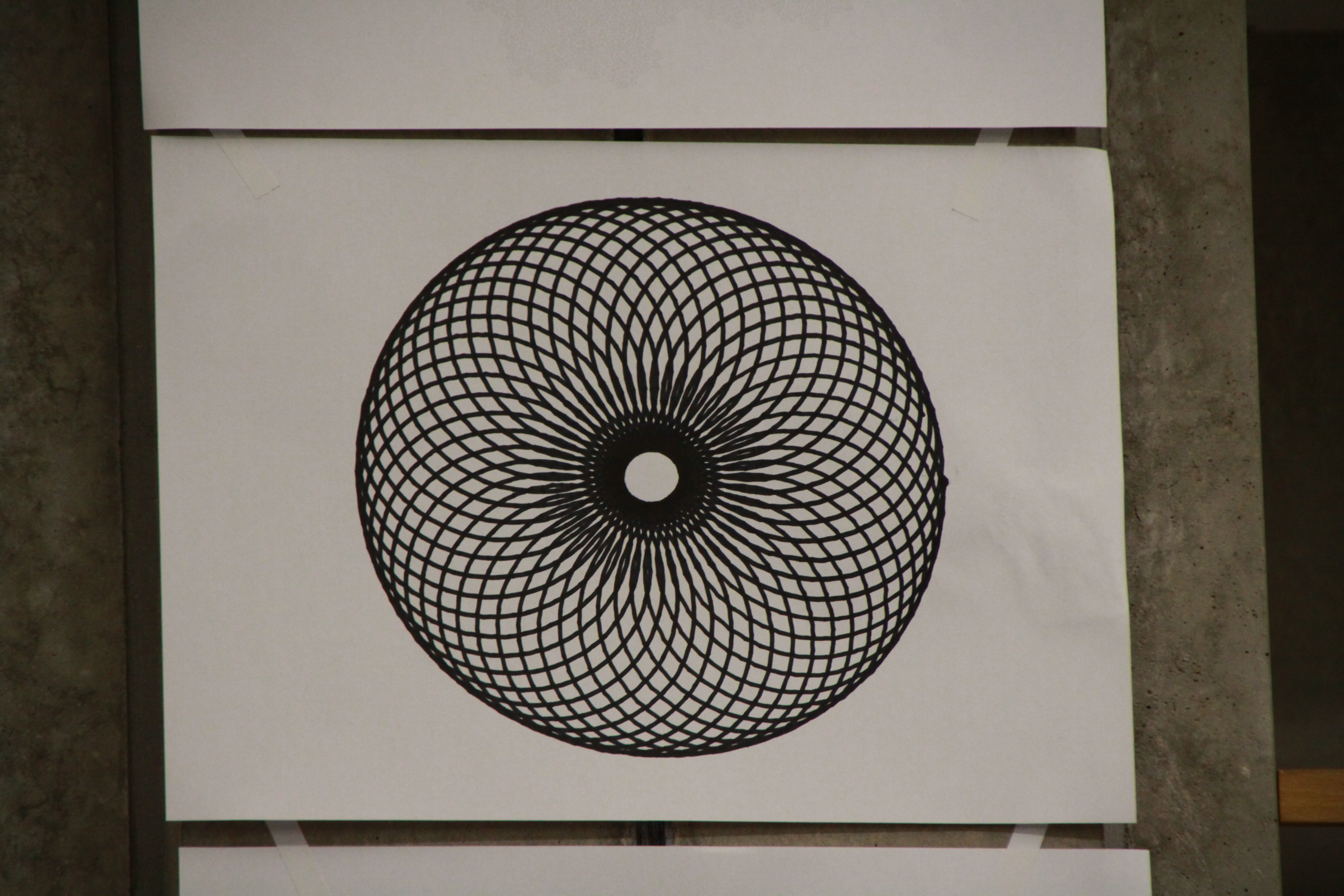
4. Beispielzeichnungen:




|