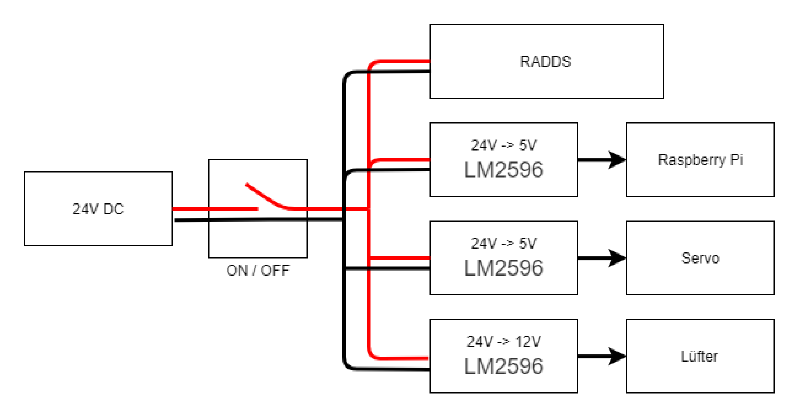
Spannungsversorgung der Systemkomponenten
Wichtig:
Servo mit getrenntem Spannungswandler versorgen, da es
sonst zu Problemen mit der Spannungsversorgung des Raspberry Pi
kommen kann!
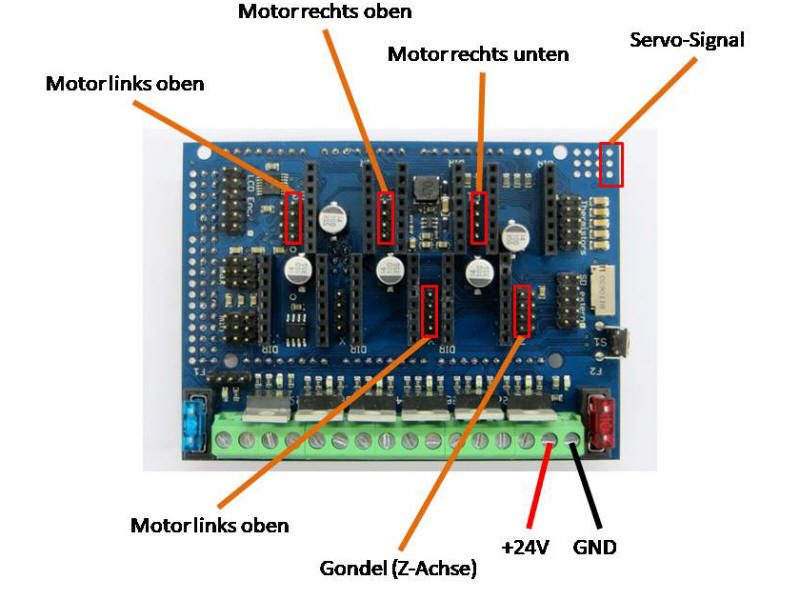
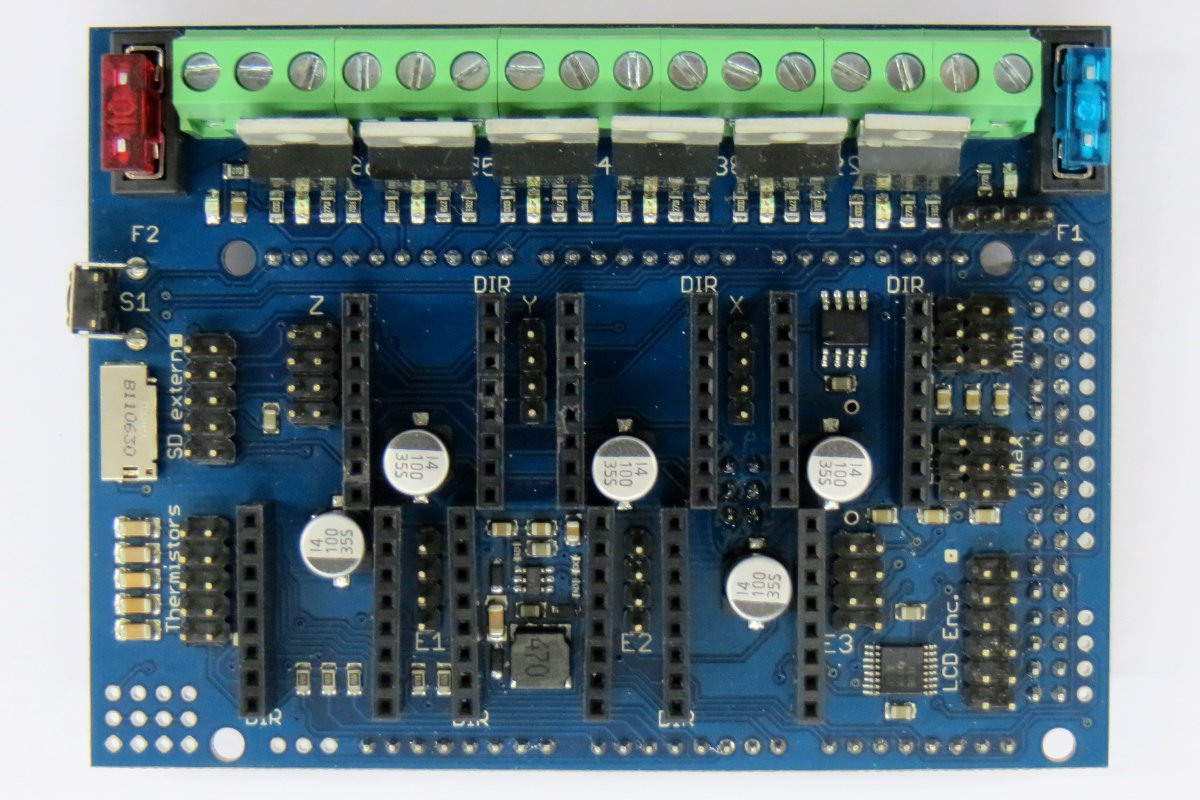
Verdrahtung RADDS-Board (Bildquelle)
Die Schrittmotortreiber werden in die entstprechenden
Steckplätze des RADDS gesteckt, hierbei ist auf die korrekte
Orientierung zu achten (DIR-Pin ist auf dem RADDS markiert).
Der Motorstrom wird bei der Verwendung von RAPS128-Treibern über
ein Potentiometer eingestellt, eine Referenzspannung von 0,9V
empfiehlt sich für die verwendeten Motoren. Die Referenzspannung
wird zwischen dem Potentiometer und GND gemessen.
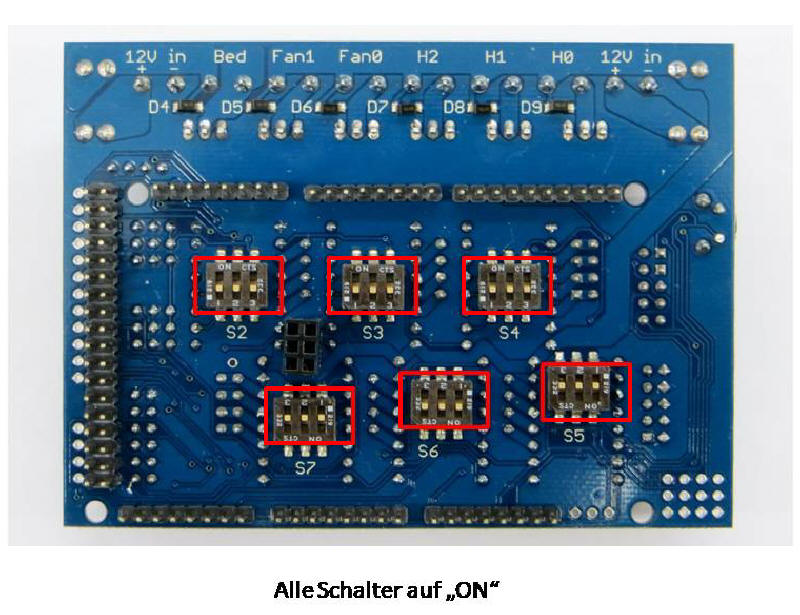
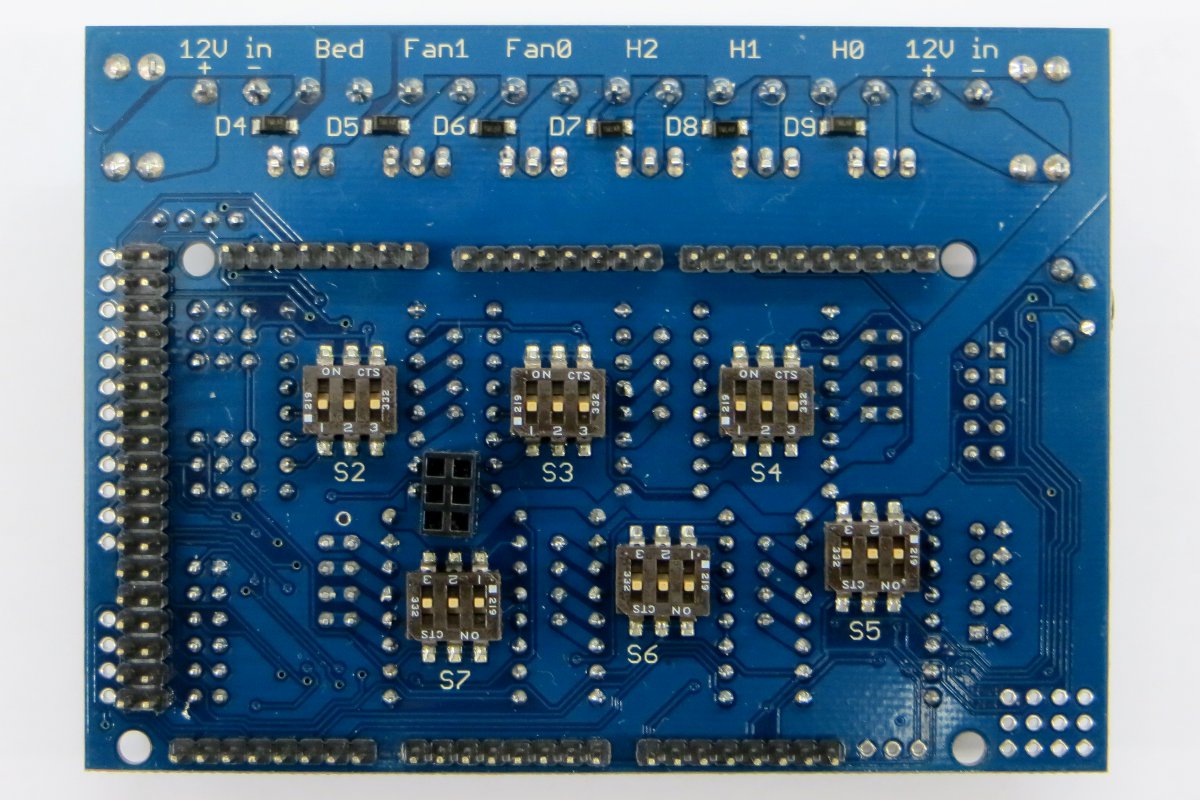
Einstellung Microstepping RADDS-Board (Bildquelle)
Bei Verwendung von RAPS128-Treibern wird der Microstepping-Modus
über die DIP-Switches an der Unterseite des RADDS-Boards
eingestellt. Zum Betrieb im 1/128-Schritt-Modus werden alle Schalter
auf ON gesetzt. Somit ergíbt sich eine Auflösung von 800 Steps pro
Milimeter Riemenlänge, was eine hochgenaue Ansteuerung ermöglicht
und zudem für einen vibrationsfreien, ruhigen Motorlauf sorgt.
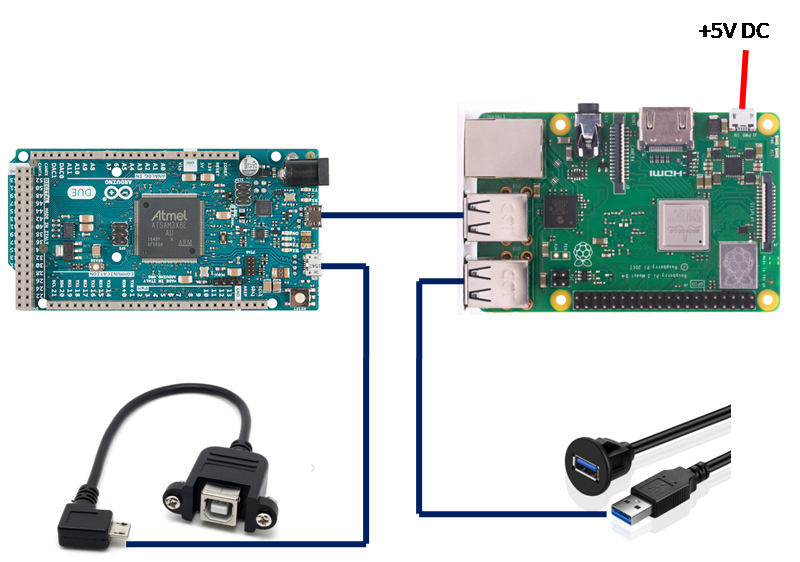
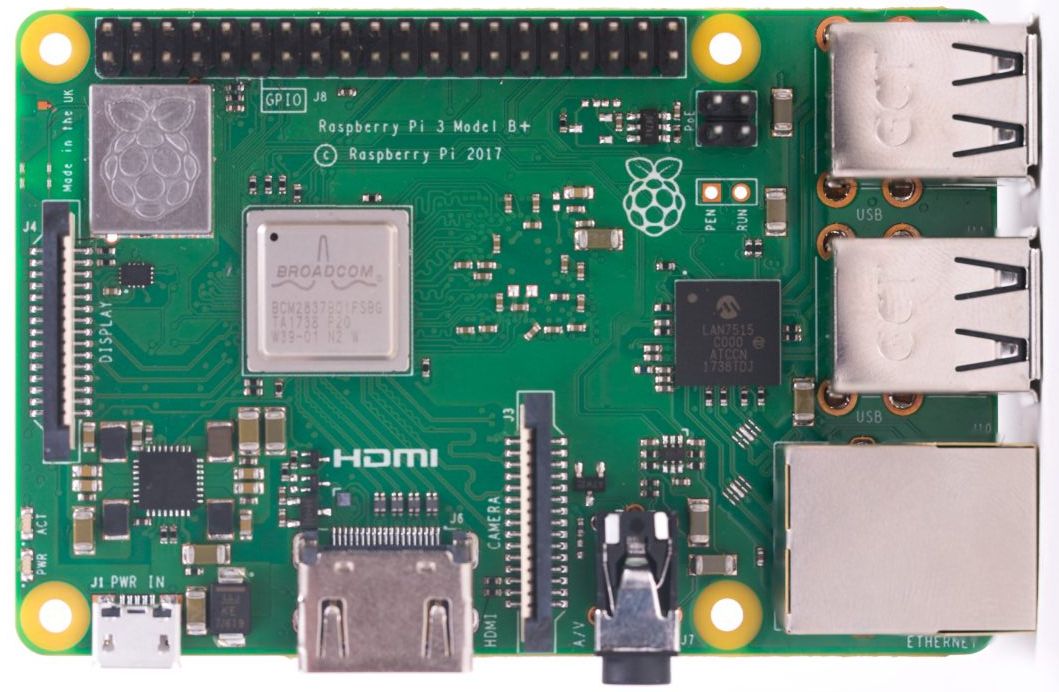
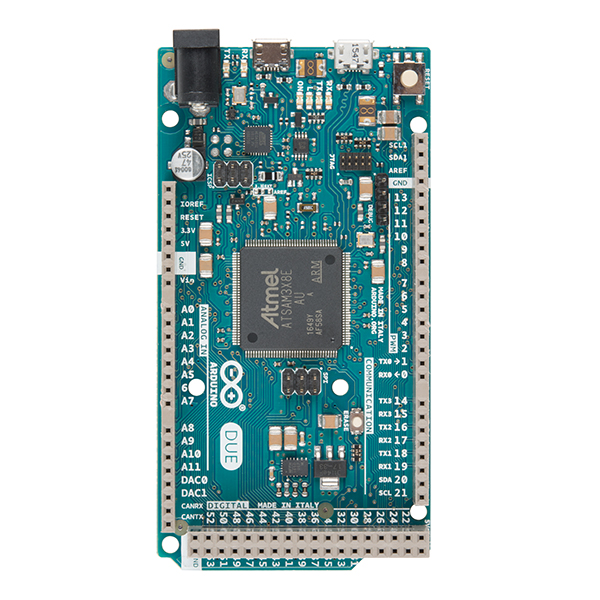
USB-Verdrahtung der Komponenten (Bildquelle:
KabelA
KabelB
RasPi
Arduino)
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}