(21.03.22) The concept is
is to
supply the drone with energy from the ground. For this, a cable will
be connected to the battery
on the drone and to a reel on the ground, then connected through a
sliding contact with a power generator to send the energy.
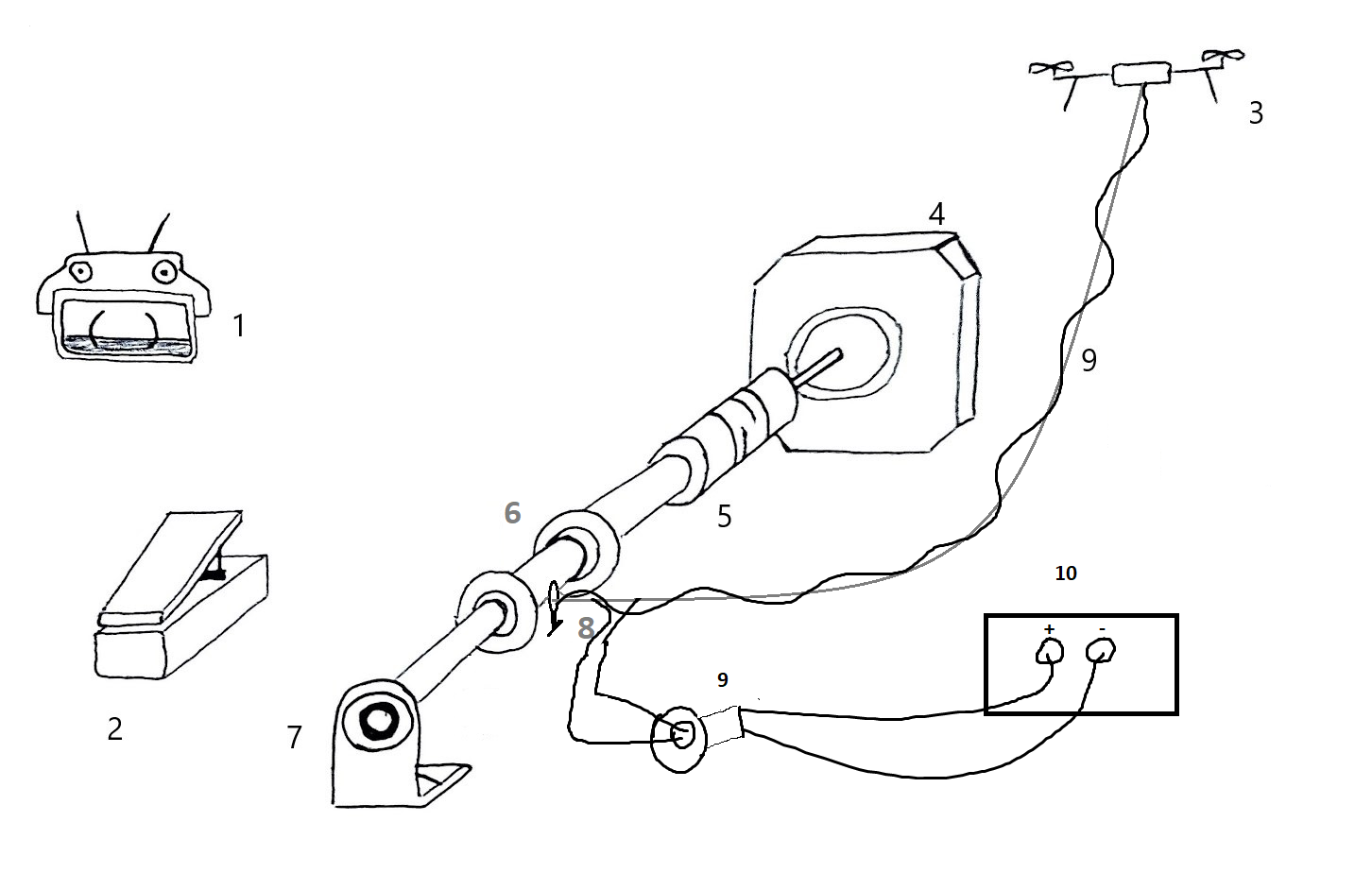
Fig.2 : Detailed Project Sketch
1: Remote control
with smartphone as display
2: Pedal with microcontroller and
motor driver integrated
3: MAVIC 2 drone with landing gear
extension
4: Stepper motor
5: Coupler
6: Reel mounted on a
freerun
7: Shaft bearing (ball bearing) with bearing block as 3D
printed part
8: Small metal ring
9: Power Cable
10: Sliding Contact
11:
Power Generator
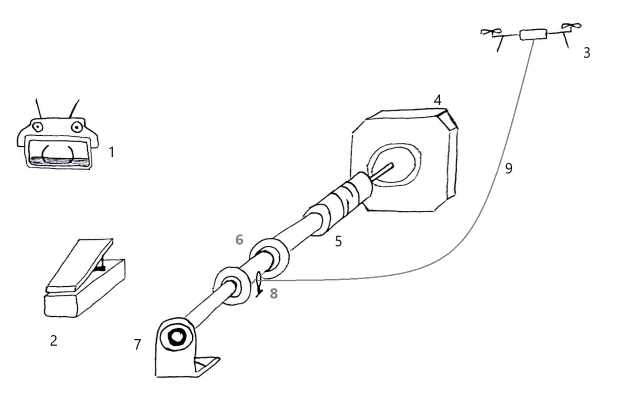
Fig. 1 : Project Sketch (14.12.21)
(03.11.21) The basic idea is to integrate an
energy-efficient ESP32 into the free space inside the pedal.
Controlled by the ESP32, an electric motor should then drive a winch
to wind up the rope. The unwinding of the rope is to take place with
minimal mechanical resistance. For this purpose, either a mechanical
freewheel is used between the winch and the motor output shaft, or a
torque-free motor operation is used in this direction of rotation.
|