|

Abb. 3.1: Funktionsmodell E-Trike
Abschlussvideo:
Last Mile Solution mit e-Trike
Im Folgenden wird die Vorgehensweise
zum Aufbau des Antriebsstrangs erklärt:
In dieser Arbeit wird lediglich ein Funktionsmodell aufgebaut,
weshalb die Beleuchtung zum jetzigen
Entwicklungsstand vernachlässigt wurde. Für die Ausarbeitung
eines Prototyps sollte diese dann im nächsten Semester eingeplant werden.
| 1. Teile aus
dem E-Scooter ausbauen |

Abb. 3.2: Forca Sports Campman II |
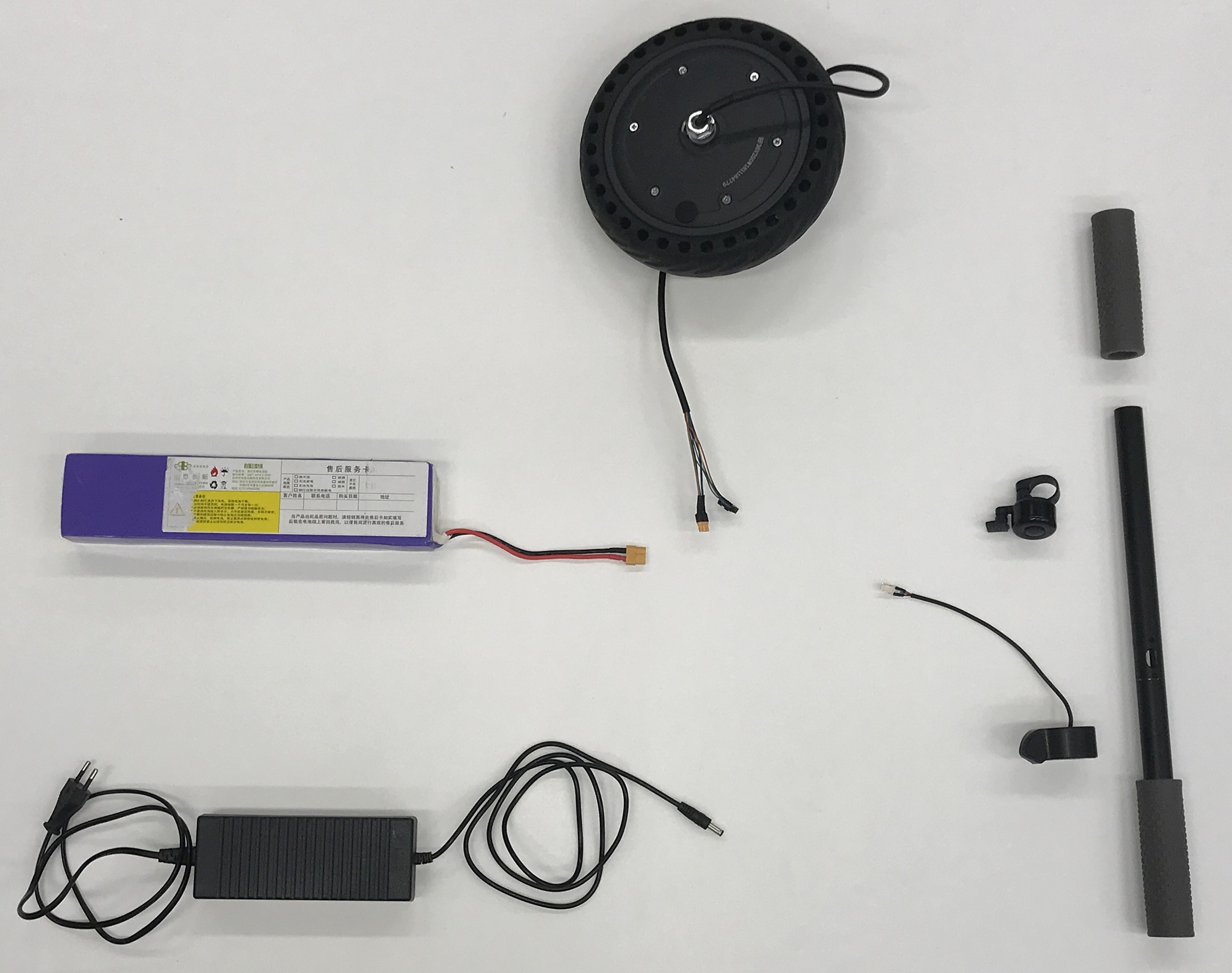
Abb. 3.3: Einzelkomponenten aus E-Scooter |
Bemerkungen:
- Zusätzlich zu dem
Motor
werden die Steck-
verbindungen auf der
Motorreglerseite
benötigt.
- Die Gummihandgriffe
können
durch leichtes
Erwärmen besser ausgebaut
werden.
- Beim Ausbau des Lenkers
wurde
die
Displayabdeckung
beschädigt. |
| 2.
Antriebsstrang aufbauen |
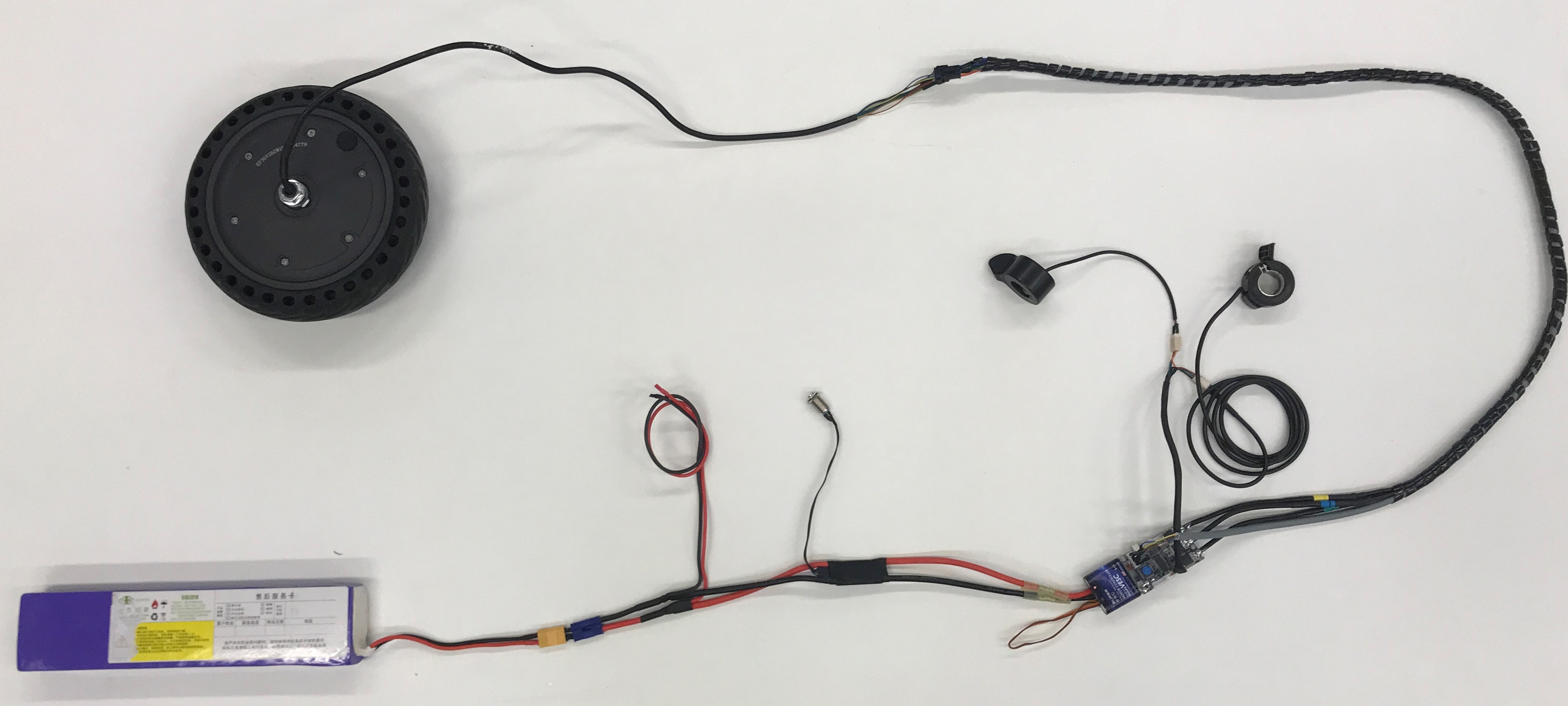
Abb. 3.4: Antriebsstrang |
Bemerkung:
- Der Antriebsstrang
wird, wie im Kapitel
Schaltplan und
Portbelegungsplan beschrieben,
aufgebaut. |
| 3. Motorregler
einlernen und Parameter einstellen |
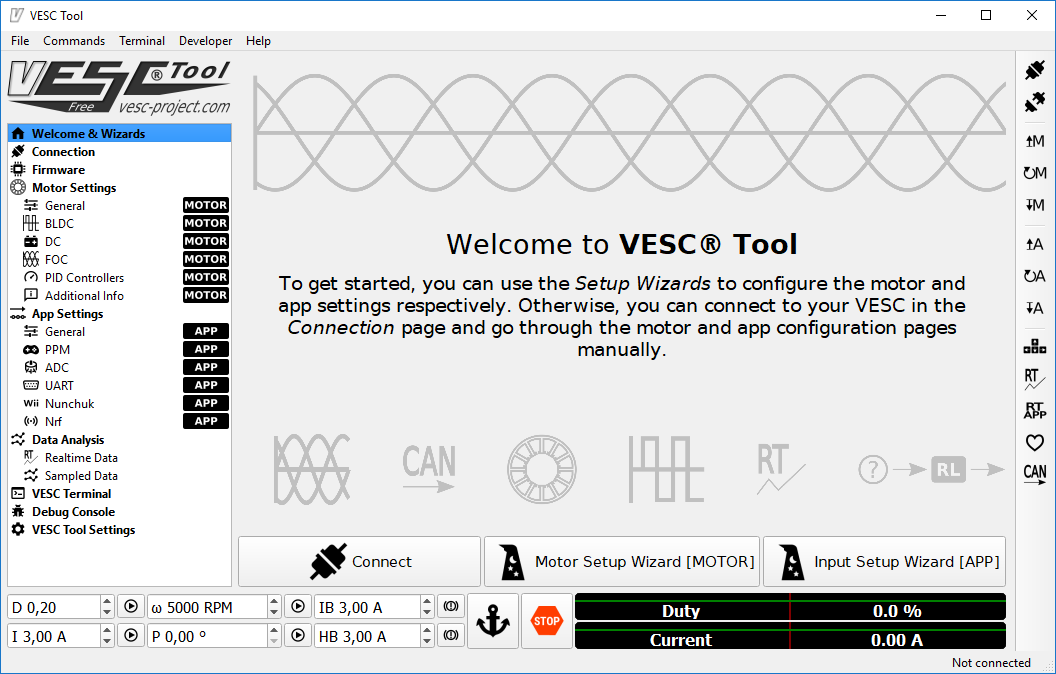
Abb. 3.5: VESC-Tool |
 |
Bemerkung:
- Die genaue
Erklärung
zur Einstellung des
Motorreglers ist in
der Software
Dokumentation zu
finden. |
| 4.
Elektronik-Box |

Abb. 3.6: Elektronik-Box |
Bemerkung:
- Die
Elektronikkomponenten wurden sicher in einer Box verstaut.
- Der genaue Aufbau ist im Kapitel Mechanik beschrieben.
- Damit kann der Antriebsstrang einfach in den Prototyp
"E-Trike"
oder "Cargo-Dreirad" eingebaut
werden. |
|