Die Aufgaben der Software bestehen aus dem Einlesen der
Gas- und Bremspedalstellung, der entsprechenden Ansteuerung des Motors, sowie
der Bereitstellung verschiedener Sicherheitseinrichtungen. All diese
Softwarefunktionen werden von dem ausgewählten Motorregler, im
folgenden "VESC" genannt, bereitgestellt, welcher auf einer
Open-Source-Firmware basiert (vgl.
https://vesc-project.com/).
Die systemspezifischen Anpassungen der Softwareparameter erfolgen dabei
durch das benutzerfreundliche VESC-Tool. Hier wurde die Version 0.95
verwendet, da diese für die gelieferten VESC´s empfohlen wird.
Nachfolgend werden wichtige gewählte Einstellungen und Parameter
erläutert.

Abb. 3.8: VESC-Motorregler
|
Motoransteuerung und
Motorparameter
Datenstand Motor Settings
Bei dem anzusteuernden Motor handelt es sich um
einen Drehstrom-Motor. Um den Motor in Bewegung zu versetzen müssen
die einzelnen Phasen (insgesamt 3 Stück) je nach aktueller
Motorposition durch ein sogenanntes Drehfeld angesteuert werden.
Dabei gibt es mehrere Möglichkeiten die Phasen zu bestromen:
| BLCD
Anteuerung (vereinfacht) |
FOC Ansteuerung
(Feldorientierte Regelung) |
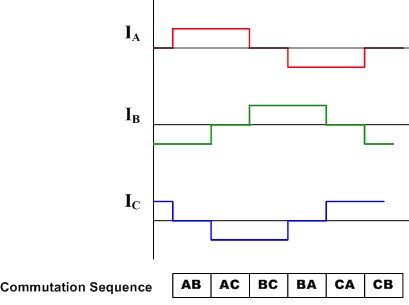
Abb. 3.9: BLDC Ansteuerung |
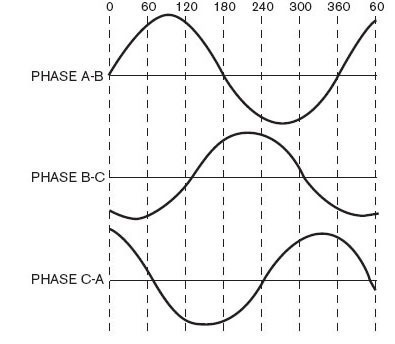
Abb. 3.10: FOC Ansteuerung |
|
Bei der klassischen BLDC-Anteuerung werden jeweils zwei der
Drei Phasen gleichzeitig bestromt. Insgesamt sind dadurch 6
verschiedene Schaltzustände möglich. |
Bei der feldorientierten Regelung
wird zu jeder Rotorposition die ideale Bestromung der Phasen
berechnet. Dies macht diese Ansteuerung besonders
effizient und verbessert das Anlaufverhalten, setzt
allerdings
einen geeigneten Sensor zur Positionsbestimmung des Motors
voraus. |
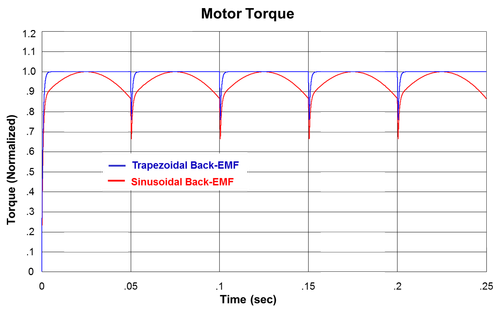
Abb. 3.11: Dremomentdiagramm BLDC vs. FOC
Vergleicht
man das Drehmomentdiagramm dieser beiden Ansteuerungsarten versteht
man, warum die Geräuschentwicklung bei Ansteuerung über FOC deutlich
geringer ist. BLDC bietet dagegen eine etwas höhere Ausgangsleistung
und damit eine höhere Endgeschwindigkeit. Da unser Motor einen
Hall-Sensor zur Positionsbestimmung besitzt und eine höhere
Effizienz und ein geringer Geräuschpegel beim Fahren wichtiger sind,
entschieden wir uns für die Ansteuerungoption FOC. Die
Motorparameter wurden dabei durch den Setup Assistenten eingelernt (vgl. Anleitung im VESC-Tool).
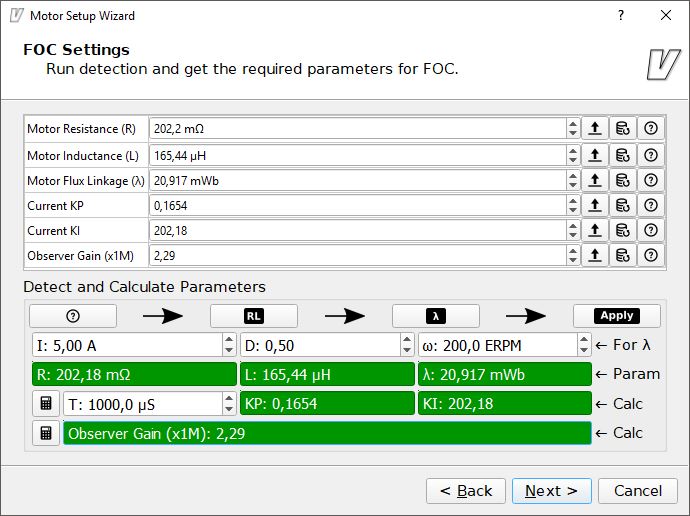
Abb. 3.12: Motorparameter aus Setup Assistent |
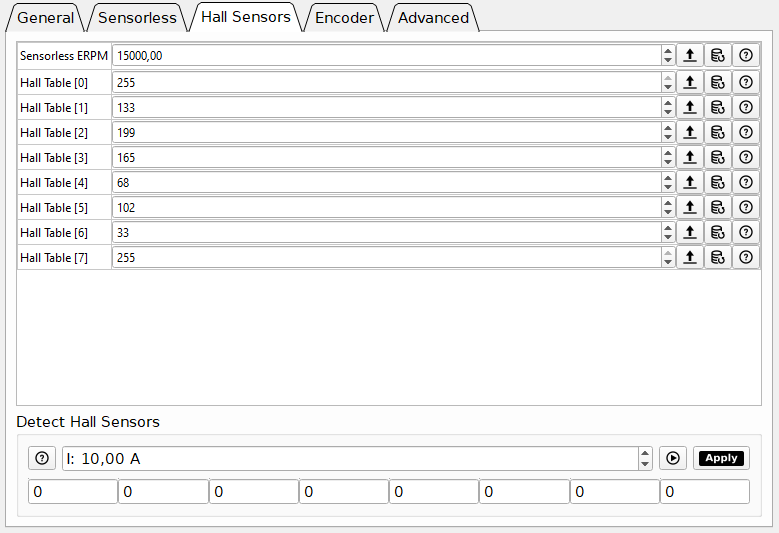
Abb. 3.13: Motordaten Hall-Sensoren |
APP-Einstellung (Steuersignale
Gas & Motorbremse)
Datenstand App Settings
Das Steuersignal bezüglich gewünschter Beschleunigung und
Verzögerung durch die Motorbremse und damit verbundener Rekuperation,
erfolgt durch zwei getrennte Potentiometer. Diese werden vom
Motorregler mit einer Spannung von 3,3 Volt versorgt und geben je
nach Betätigung eine Spannung zwischen 0,9 V und 2,6 V an den
Motorrelger zurück. Diese Steuerspannung wird über die beiden
ADC-Kanäle des Motorreglers eingelesen. Die jeweilige Minimal- und
Maximalspannung wurde für jeden Kanal eingetragen und entspricht
damit 0 % bzw. 100 % Gas/Bremse. Um die Dosierbarkeit des Gashebels
und damit die Fahrbarkeit bei geringen Geschwindigkeiten zu
verbessern, wurde die Kennlinie um einen exponentiellen Anteil
ergänzt. Damit eine entsprechende Ansteuerung des Motors, wie eben
beschrieben, erfolgt, muss bei der Einstellung
AppSettings->General->ControlType die Option "Current No Reverse
Brake ADC2" ausgewählt werden.
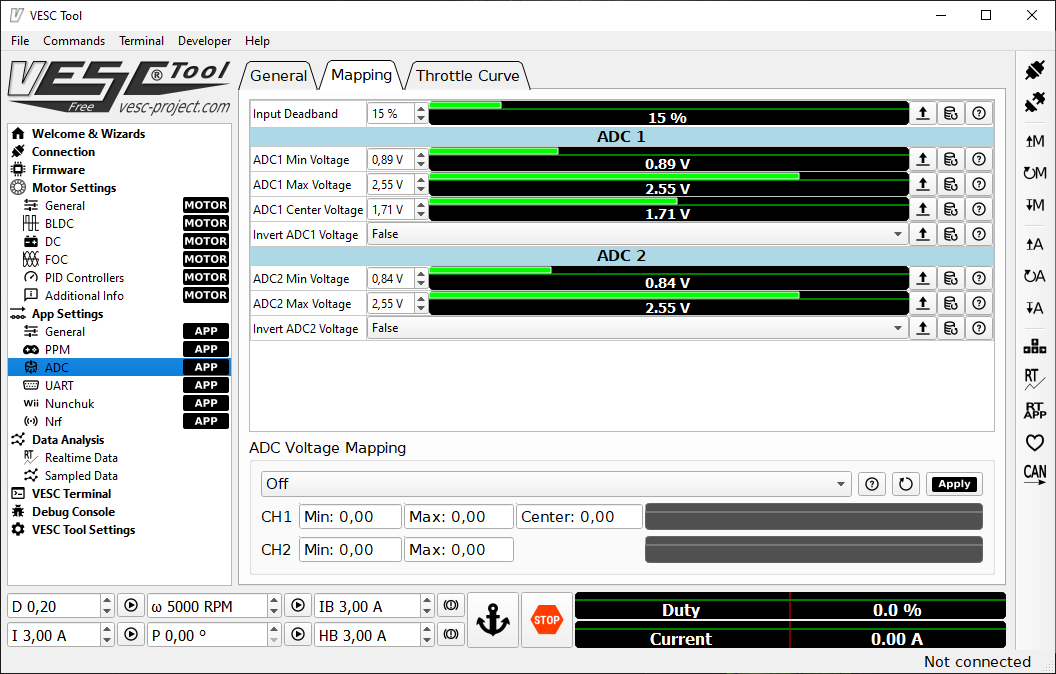
Abb. 3.14: Steuerspannungen ADC1 und ADC 2 |
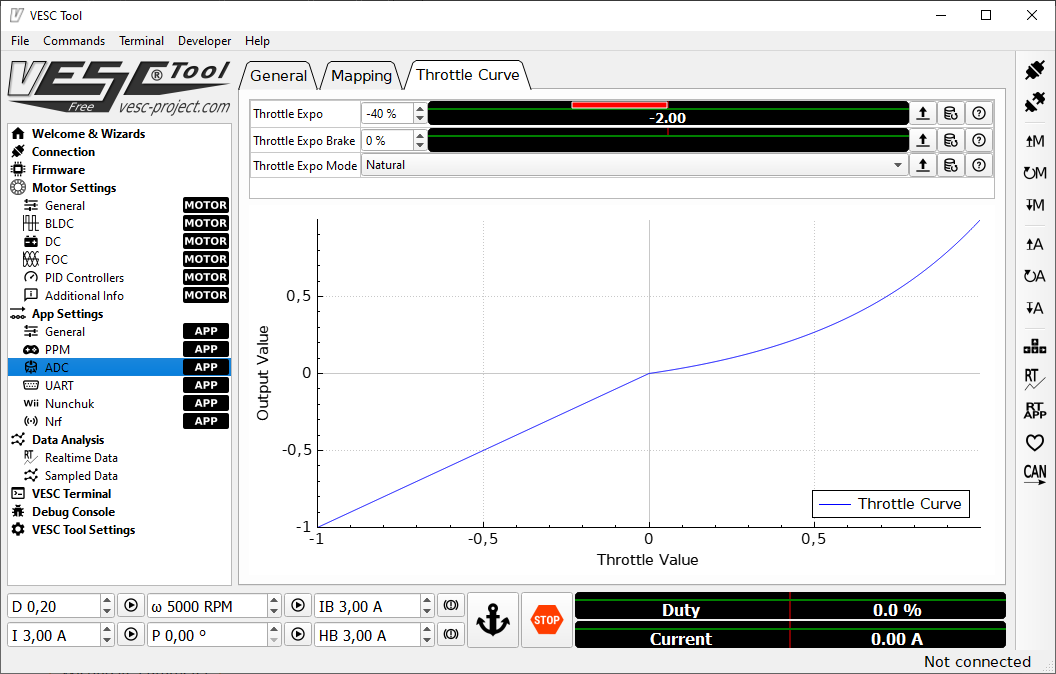
Abb. 3.15: Beschleunigungs-Kennlinie |
Sonstige Parameter
Im Bereich Motor Settings - General:
| Motor
Current Max |
20 A |
Hier wird der maximal zulässige
Strom des Radnabenmotors eingestellt. Herstellerseitig wird
häufig nur eine Dauerbelastbarkeit angegeben, die maximale
Peakbelastbarkeit liegt meist deutlich über dieser Angabe.
Da in unserem Fall keine Motorkenndaten gegeben waren,
mussten wir dies Stromgrenze langsam erhöhen, bis eine
ähnliche Beschleunigung wie im Original-Roller erreicht
wurde,
ohne dass der Motor überhitzt. |
| Motor
Current Max Brake |
-30 A |
Stellt ein, wie stark der Motor
abgebremst wird. |
|
Battery Current Max |
16,5 A |
Einstellung
der maximal möglichen Energieabgabe der Batterie. Da keine
Kennwerte der 5 AH großen Batterie angegeben waren, wurde
der maximale Strom im Originalroller gemessen und
hier übernommen. |
|
Battery Current Max Regen |
-10 A |
Maximaler Ladestrom der Batterie
durch Rekuperation. Hier wurde eine maximale Laderate von 2C
angenommen. |
|
Maximum Wattage |
600 W |
Um den Motor nicht zu überlasten,
wurde außerdem eine Grenze der maximalen Antriebsleistung
von 600 W festgesetzt, was den Angaben des Rollerherstellers
enstpricht. |
Im Bereich Motor Settings - FOC
|
Switching Frequency |
30 kHz |
Um die geforderten Schaltzustände
der einzelnen Phasen zu realisieren, schaltet der Motorregler
die Ausgänge nach dem Prinzip der PWM. Die Schaltfrequenz
kann hier varriert werden. Um störende Pfeifgeräusche im
hörbaren Frequenzbereich zu eliminieren, wird hier eine
Schaltfrequenz von 30 kHz (reale 15 kHz) eingestellt. |
|